SPAICR
Spatial AI for cooperative construction robotics
Principal Investigators
Prof. Dr. Kathrin Dörfler
TT Professorship for Digital Fabrication, Department of Architecture
Prof. Dr. Stefan Leutenegger
TT Professorship for Machine Learning for Robotics, Department of Informatics
Project contributors
Begüm Saral, M.A.,
Professorship for Digital Fabrication, Department of Architecture
Hanzhi Chen, M.Sc.,
Professorship for Machine Learning for Robotics, Department of Informatics
Project summary
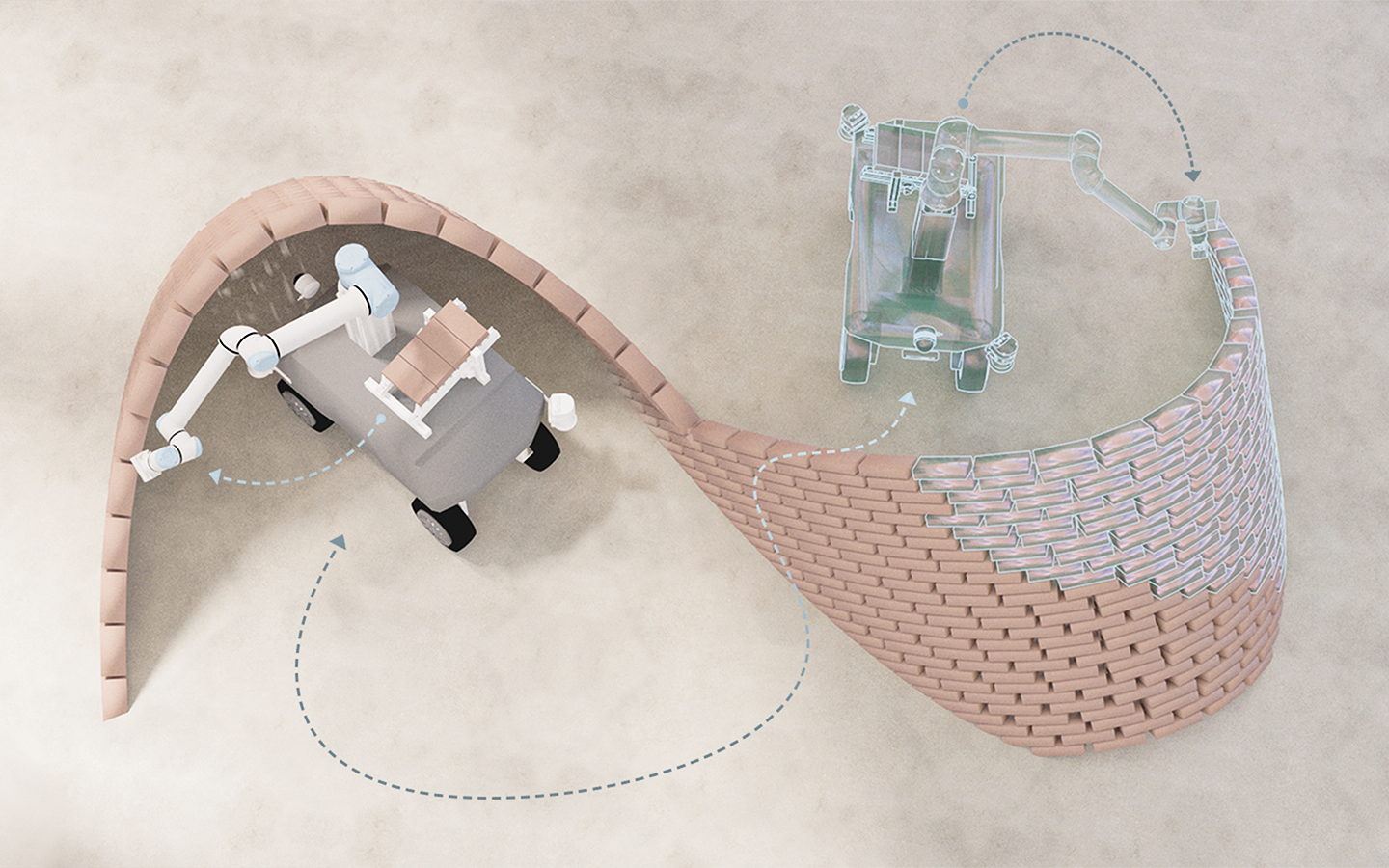
The introduction of cooperative mobile robots into construction processes holds enormous potential for the architecture, engineering and construction (AEC) industries. Their use promises an increase in efficiency and safety, a reduction in costs and errors, and an increase in the accuracy that can be achieved, both for new buildings and for buildings in the existing context for renovation, repair and maintenance. Construction sites, however, pose substantial challenges to robot deployment. They are inherently subject to change, due to the construction process itself. Their environment is characterized as poorly structured and dynamic, as different actors, both humans and robots, are required to carry out various heterogeneous tasks. Therefore, the use of mobile robots for cooperative building construction with an acceptable degree of accuracy, robustness, and coordination has not yet been demonstrated at scale today. With this project, we aim at making progress towards real-world deployment of cooperative mobile construction robots by leveraging advanced Spatial Artificial Intelligence (Spatial AI) and spatial computing techniques from Computer Vision and Robotics to create and maintain a Digital Twin (DT) for cooperative robotic processes. This DT will not only contain the location and state of building objects but also the location and state of cooperating robots – using Simultaneous Locali-sation and Mapping (SLAM) and Machine Learning (ML)-enabled geolocation technologies for accurate and robust multi-agent pose registration. As such, these Spatial AI algorithms will allow for automated progress monitoring and construction process documentation, as well as robotic task coordination. In order to achieve this goal, our proposed approach will not only make use of sensory data as acquired by multiple agents, but also of available assembly and construction plans as provided by architectural design and planning tools. At the end of the project, we aim to present a DT for cooperative construction robotics, which can process and combine spatial and semantic data from several moving cameras that can either be mounted on a mobile robot or carried in hand-held devices (tablets, mobile phones), and thus allowing both autonomous robots and human operators to interact with it – eventually used to help optimise the safety, efficiency and quality of construction work.